Según su estructura: La estructura es definida por el tipo de configuración general del robot, puede ser metamórfica.
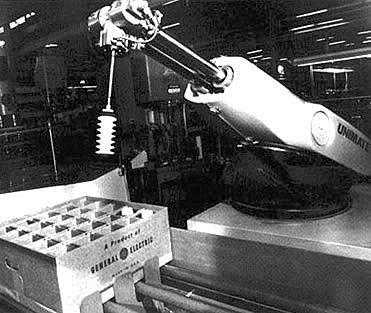
1. Poliarticulados
En este grupo se encuentran los robots manipuladores, los robots industriales y los robots cartesianos, que se emplean cuando es preciso abarcar una zona de trabajo relativamente amplia o alargada, actuar sobre objetos con un plano de simetría vertical o reducir el espacio ocupado en el suelo.
2. Móviles
Son Robots con gran capacidad de desplazamiento, basados en carros o plataformas y dotados de un sistema locomotor de tipo rodante. Siguen su camino por telemando o guiándose por la información recibida de su entorno a través de sus sensores.
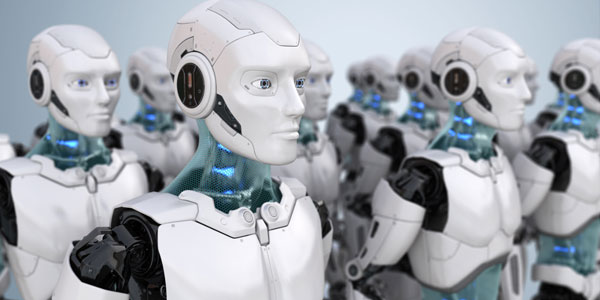
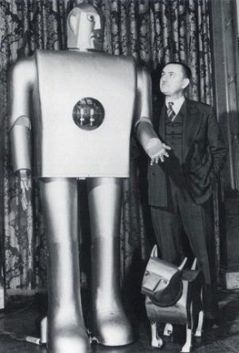
3. Androides
Robot androide
Son los tipos de robots que intentan reproducir total o parcialmente la forma y el comportamiento cinemático del ser humano. Actualmente, los androides son todavía dispositivos muy poco evolucionados y sin utilidad práctica, y destinados, fundamentalmente, al estudio y experimentación.
4. Zoomórficos
Los robots zoomórficos, que considerados en sentido no restrictivo podrían incluir también a los androides, constituyen una clase caracterizada principalmente por sus sistemas de locomoción que imitan a los diversos seres vivos. Es conveniente agrupar a los Robots zoomórficos en dos categorías principales: caminadores y no caminadores.

5. Híbridos
Estos robots corresponden a aquellos de difícil clasificación, cuya estructura se sitúa en combinación con alguna de las anteriores ya expuestas, bien sea por conjunción o por yuxtaposición. Por ejemplo, un dispositivo segmentado articulado y con ruedas es, al mismo tiempo, uno de los atributos de los robots móviles y de los robots zoomórficos







:quality(75)/cloudfront-us-east-1.images.arcpublishing.com/elcomercio/L56TUODCPRAUDHM7ZNYU6A3Y2Q.jpg)